Układ umożliwia pomiar czasu spadku swobodnego. Po podłączeniu płytki do laptopa i uruchomieniu programu zrzucany przedmiot umieszcza się przed fotorezystorem, zrzuca a następnie układ wyświetla czas w jakim przedmiot spadł.
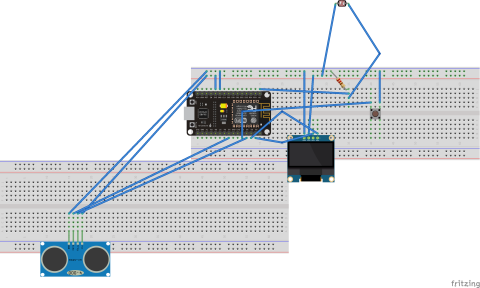
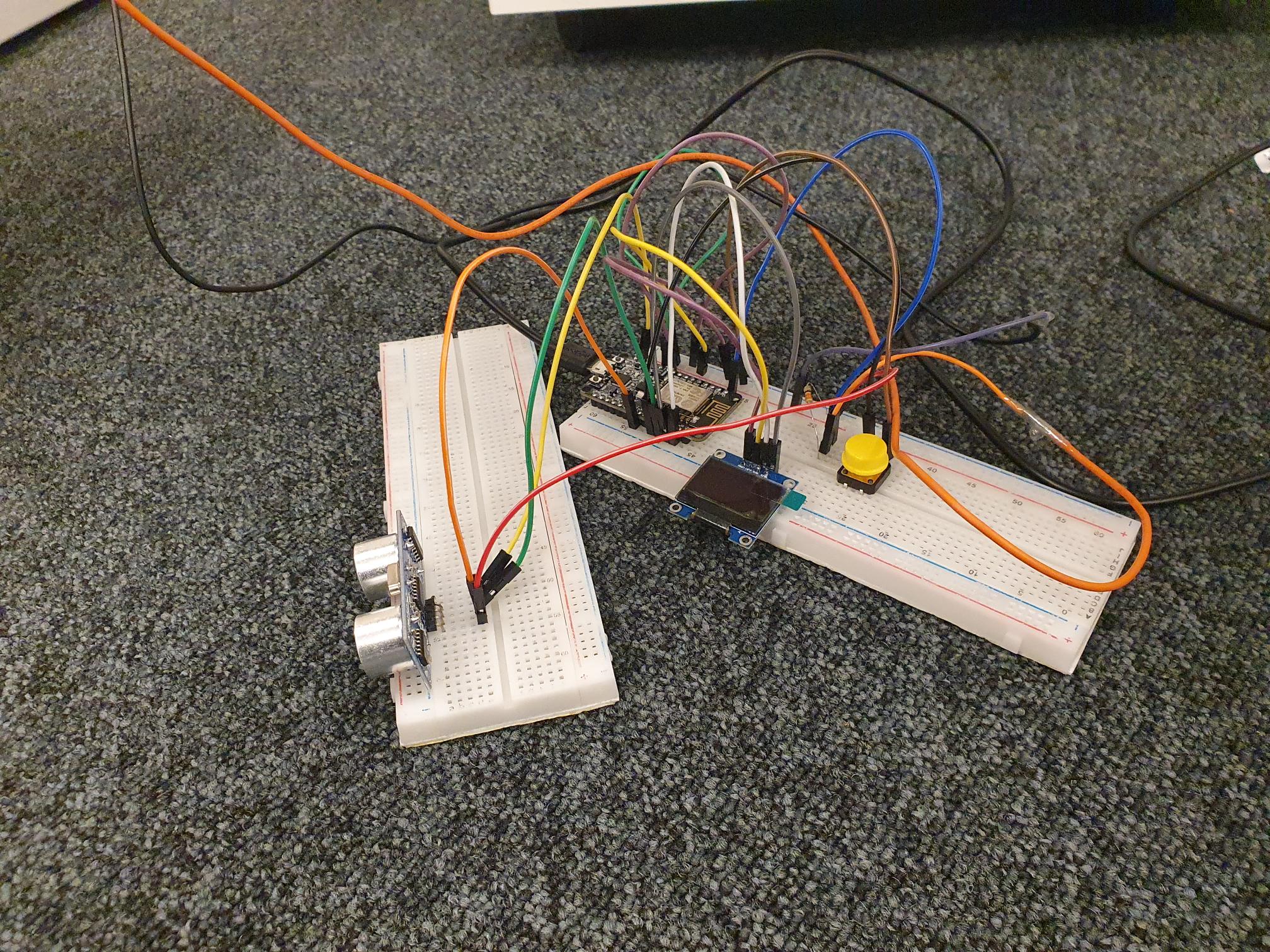
1. ESP8266
2. wyświetlacz OLED niebieski graficzny 0,96'' 128x64px I2C
3. Przycisk
4. Czujnik odległości HC-SR04
5. Rezystor 330 Ohm
6. Przewody męsko-męskie i męsko-żeńskie
7. 2 przewody 1.5m
8. Przewód microUSB
1. Laptop z systemem Windows 10 (na innych nie ma gwarancji działania) i programem Thonny
2. Lutownica
3. Kombinerki
Na wyświetlaczu OLED pokazuje się tekst powitalny. Po naciśnięciu przycisku należy zbliżyć zrzucany przedmiot do fotorezystora, umieszczonego na pewnej wysokości dokładnie nad czujnikiem odległości. Układ mierzy czas spadku swobodnego poprzez rozpoznanie przez fotorezystor momentu upuszczenia przedmiotu, a ultradźwiękowy czujnik odległości rozpoznaje moment upadku. Upuszczane przedmioty powinny mieć wymiary większe niż 10cm. Po rozpoznaniu upadku na wyświetlaczu pojawia się czas spadania w milisekundach, po czym można powtórzyć pomiar naciskając przycisk.
mes='Witaj, aby '