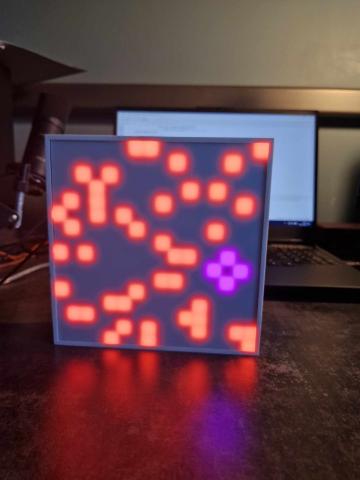
Program jest implementacją popularnej gry symulacyjnej o nazwie „Gra w życie” (ang. Game of Life), stworzonej przez brytyjskiego matematyka Johna Conwaya. Gra ta to forma automatu komórkowego, gdzie komórki umieszczone na dwuwymiarowej planszy zmieniają swoje stany (z żywej na martwą lub odwrotnie) w zależności od prostych reguł dotyczących ich sąsiedztwa. W tej wersji programu zastosowano dodatkową funkcjonalność, która wykrywa stabilne struktury – takie, które po pewnym czasie nie ulegają zmianie – i zmienia ich kolor na fioletowy na macierzy diod LED.
Projekt umożliwia zapoznanie się tematyką ciśnienia hydrostatycznego w praktyce. Pokazuje zależności między mocą pompy a możliwą do osiągnięcia wysokością słupa wody, a zatem uczy czym jest sygnał PWM. Użytkownik ustawia czas pracy pompy oraz moc pompy dobierając odpowiednie wypełnienie sygnału za pomocą przycisków.

Pomiar przyspieszenia wózka jadącego z równi pochyłej, biegnącego kolegi czy jego pięści, wszystko to wykonasz przy pomocy tego prostego zestawu. Pozwala on na dokonanie 17tu pomiarów w czasie 8 sekund i wizualizację ich w przeglądarce z wykorzystaniem WiFi (acces point).

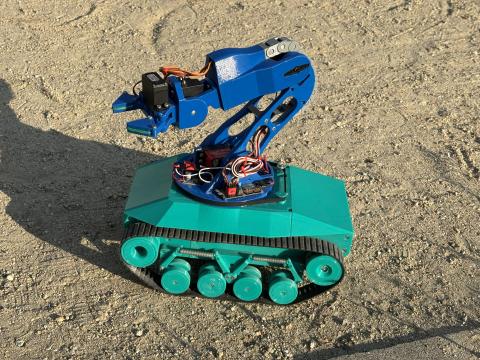
Zdalnie sterowana platforma robota z napędem gąsienicowym + 6-osiowy manipulator. Całkowicie autorska konstrukcja, wszystkie elementy, w tym gąsienice, są wydrukowane na drukarce 3d. Czołg świetnie radzi sobie nawet w bardzo trudnym terenie. Jest to konstrukcja modularna, czołg można zmontować bez ramienia, wewnątrz jest bardzo dużo miejsca na dodatkowy akumulator i więcej elektroniki. Czołg jest zdalnie sterowany z pada do PS4, ale można łatwo zmodyfikować kod do współpracy z innym kontrolerem.
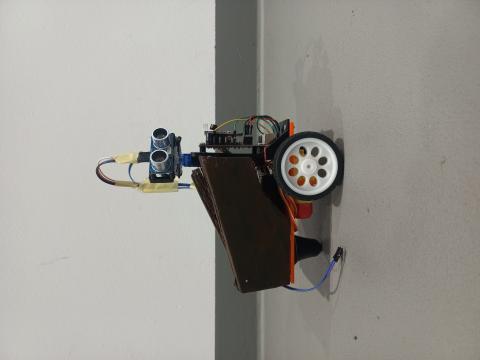
Nasz robot skanuje okoliczny teren z użyciem dwóch obracających się sonarów, a odczytane dane wysyła do komputera przez port szeregowy.
Projekt zawiera dwie płytki - esp32 Cam oraz nanoch32v00x. Z powodu ograniczonej liczby pinów na esp32 ch32 jest używane jako narzędzie do odczytu pomiarów z dalmierzy, które następnie są wysyłane UARTem do esp32, które już może komunikować się z komputerem.
Projekt polega na budowie dekodera alfabetu Morse'a z wykorzystaniem dwóch modułów ESP8266. Użytkownik wprowadza znaki Morse'a za pomocą przycisków, a układ rozpoznaje kropki i kreski, dekoduje je na litery oraz wyświetla wyniki w interfejsie WWW. Dodatkowo projekt umożliwia komunikację pomiędzy dwoma urządzeniami oraz naukę alfabetu Morse'a z wykorzystaniem diody LED i buzzera.
Projekt „Traktor” to mobilny robot z kamerą, sterowany mikrokontrolerem ESP32-CAM. Działa w dwóch trybach: manualnym, z podglądem na żywo i sterowaniem z poziomu przeglądarki w smartfonie, oraz autonomicznym. W trybie inteligentnym robot analizuje obraz w czasie rzeczywistym, samodzielnie śledzi czerwone obiekty, podjeżdża do nich i podnosi je za pomocą ruchomego ramienia z łyżką.

Projekt polega na wykonaniu interaktywnej gry Snake na matrycy LED NeoPixel 16x16 z wbudowanym mikrokontrolerem ESP8266. Gra obsługuje tryb jedno i wieloosobowy, a sterowanie odbywa się bezprzewodowo za pomocą kontrolerów z przyciskami kierunkowymi. Kod projektu został przygotowany w Visual Studio, a całość obejmuje logikę gry, obsługę matrycy, komunikację ESP-NOW oraz testy działania.
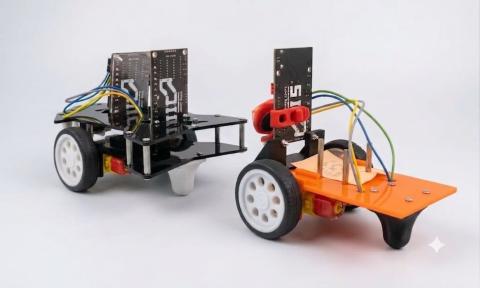
Projekt polega na zaprojektowaniu i zbudowaniu dwóch autonomicznych robotów mobilnych, które realizują algorytm zabawy w "berka". Głównym celem jest implementacja systemu wizyjnego opartego na tanim i wydajnym module ESP32 CAM, który pozwoli robotowi goniącemu na lokalizowanie, śledzenie i podążanie za robotem uciekającym w czasie rzeczywistym.