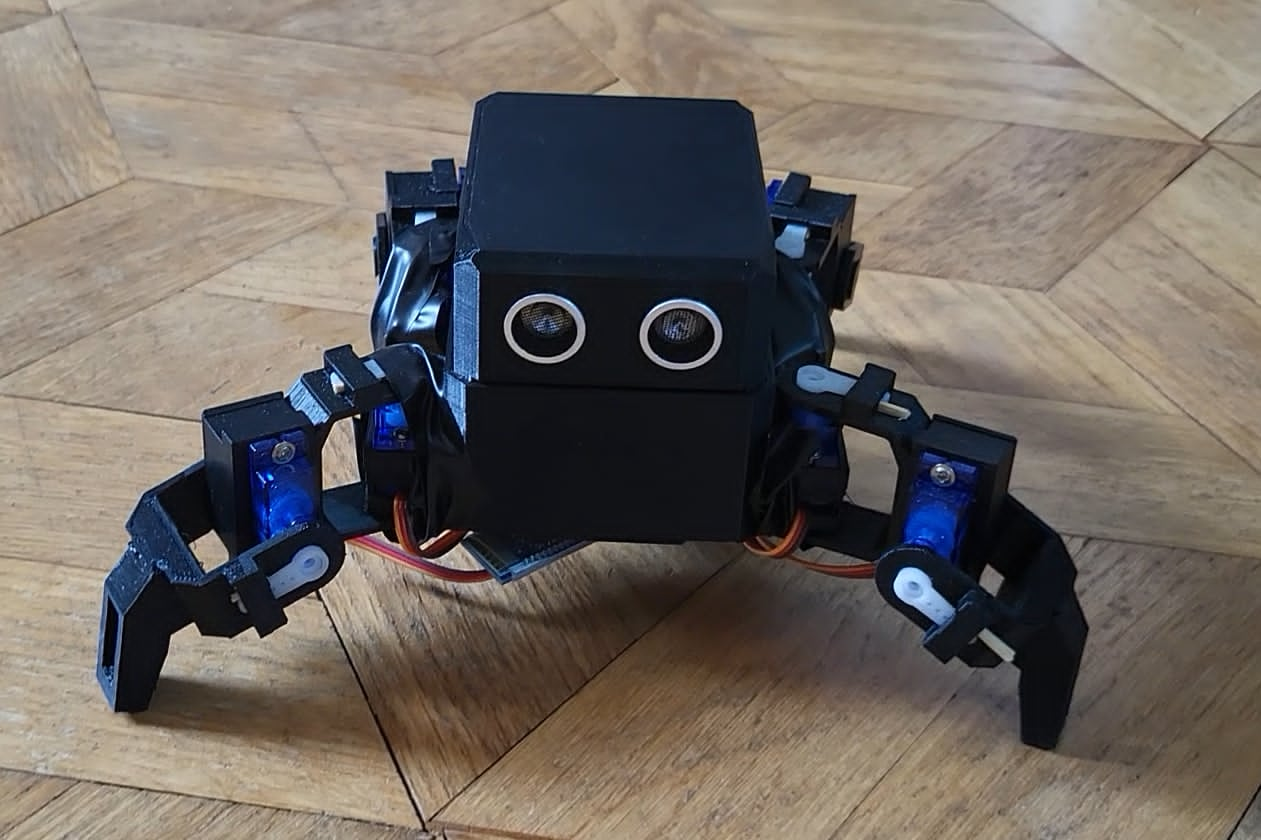
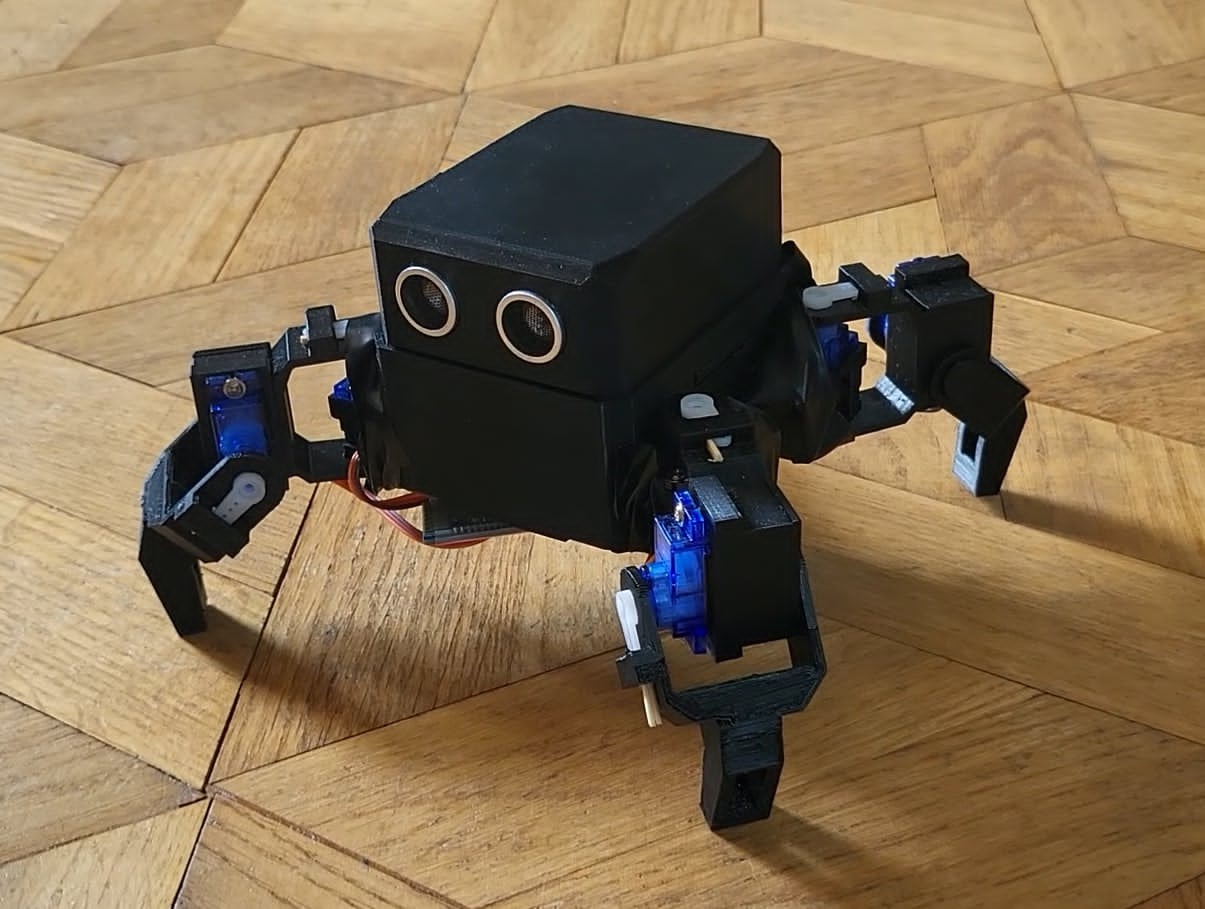
Robot kroczący OTTO to 4-nożna platforma oparta na architekturze C/C++, działającej na płytkach Arduino, oraz łączności bezprzewodowej Bluetooth. Jest to projekt opisany jako OpenSource, a wszystkie niezbędne elementy, jak i oprogramowanie oraz konstrukcja gotowa do wydruku są ogólnodostępne, co znacznie skraca ilość czasu potrzebnego do stworzenia funkcjonalnego robota. Zaleca się jednak samemu stworzyć aplikację do sterowania oraz oprogramowanie, co jeszcze bardziej pozwoli poznać części elektroniczne projektu. Projekt dostępny na stronie https://www.thingiverse.com/thing:3965031/files
1. Arduino Nano (najlepiej z Nano Expansion Adapter)
1a. Przewody żeński-żeński, alternatywnie płytka prototypowa oraz przewody żeńsko-męski.
2. 8 serwomechanizmów sg90 (180 stopni)
3. Wydrukowane pliki stl (pliki 2nogi i 2stopy należy wydrukować 2 razy)
4. Moduł Bluetooth
5. zewnętrzne zasilanie z przyciskiem do szybkiego załączania i rozłączania (najlepiej użyć akumulatorów Ni-MH lub Li-Po o parametrach napięcia około 7.2V oraz pojemności 4000mAh.
6. Ultradźwiękowy czujnik odległości SR-04
7. Śrubokręt krzyżakowy
8. https://appinventor.mit.edu - darmowa strona do napisania własnej aplikacji.
9. Projekt dostępny na stronie https://www.thingiverse.com/thing:3965031/files
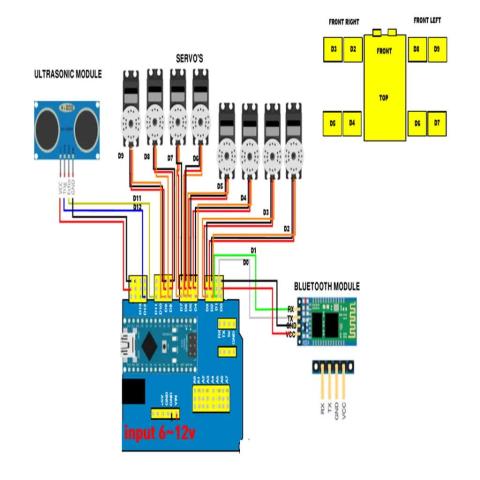
Jeżeli masz już wszystkie niezbędne elementy, to trzeba teraz zbudować całego robota. Połączenia zrealizuj zgodnie z dołączonym schematem.
Załączamy również autorską instrukcję montażu.
Instrukcja:
1. Zamontowanie serwomechanizmów w obudowie.
2. Podłączenie serwomechanizmów do płytki (tutaj najlepiej napisać testowy program i ustawić serwomechanizmy do kąta 90 stopni tak, aby zamontowane miały pełny zakres ruchu).
3. Podłączenie modułu bluetooth do płytki.
UWAGA: Moduł bluetooth jest podłączony pod wejście komunikacji z Arduino. Aby program wgrał się z komputera, należy za każdym razem odłączyć na ten czas moduł BT i podłączyć go z powrotem po wgraniu.
4. Podłączenie czujnika odległości do płytki.
5. Podłączenie akumulatora do płytki (plus do VIN, minus do GND)
6. Zamknięcie wszystkiego w obudowie.
Programowanie i aplikacja:
1. Do aplikacji użyj strony https://appinventor.mit.edu. Jest to darmowy i bardzo przyjazny edytor do tworzenia własnej aplikacji na telefon. Na samej stronie dostępne są tutoriale, ale na Youtube również da się znaleźć sporo na ten temat.
2. Użyte serwomechanizmy nie są bardzo dokładne, a wydrukowane elementy mogą minimalnie różnić się od siebie i mieć luzy. Ustawianie punktu pracy serwomechanizmów oraz generowanie ruchów będzie wymagało metody prób i błędów. Do kontrolowanie obrotu serwomechanizmów użyj wbudowanej biblioteki "Servo".
3. W celu skorzystania z załączonego gotowego rozwiązania należy zmodyfikować lekko kod. Do kalibracji serwomechanizmów trzeba skomentować ostatnią linijkę, a odkomentować niżej funkcję trim za pomocą, której metodą prób i błędów należy dobrać odpowiednie wartości. Należy zmienić to w pliku OTTOKame.cpp
Rzeczy, na które warto zwrócić uwagę:
1. Należy uważać podczas podłączania elementów do Arduino i/lub Expandera. Na Expanderze są odpowiednio wyjścia (S, V, G). Są to wyjścia do serwomechanizmów odpowiednio Signal, Napięcie zasilające, GND. Każde niepoprawne podłączenie może skutkować przepaleniem elementów. Koniecznie warto sprawdzać również poprawność podłączenia zasilania zewnętrznego.
2. Każda drukarka 3D ma swoją tolerancję i dokładność. Problem, na który my natrafiliśmy polegał na niepasujących do obudowy zaślepek. Należy je wtedy dopasować ręcznie, np. stosując pilnik.
3. Przy programowaniu swojego robota pamiętaj o ograniczeniu w zakresie ruchu. Obrót serwomechanizmów jest ograniczony elementami obudowy oraz innymi nogami. Należy podawać taki kąt, aby serwomechanizmy nie blokowały się - może to spowodować ich uszkodzenie lub wcześniejsze zużycie.
4. Aby oszczędzić trochę baterii oraz czasu czekając aż się naładują, należy ograniczyć testowanie robota do minimum.


ZIP poniżej