
Projekt to inteligentny system oświetleniowy oparty na mikrokontrolerze ESP8266.
System automatycznie dostosowuje jasność lampki w zależności od ilości światła
padającego na fotorezystor. Dzięki temu możliwe jest oszczędzanie energii oraz
zapewnienie optymalnego oświetlenia w zmieniających się warunkach.
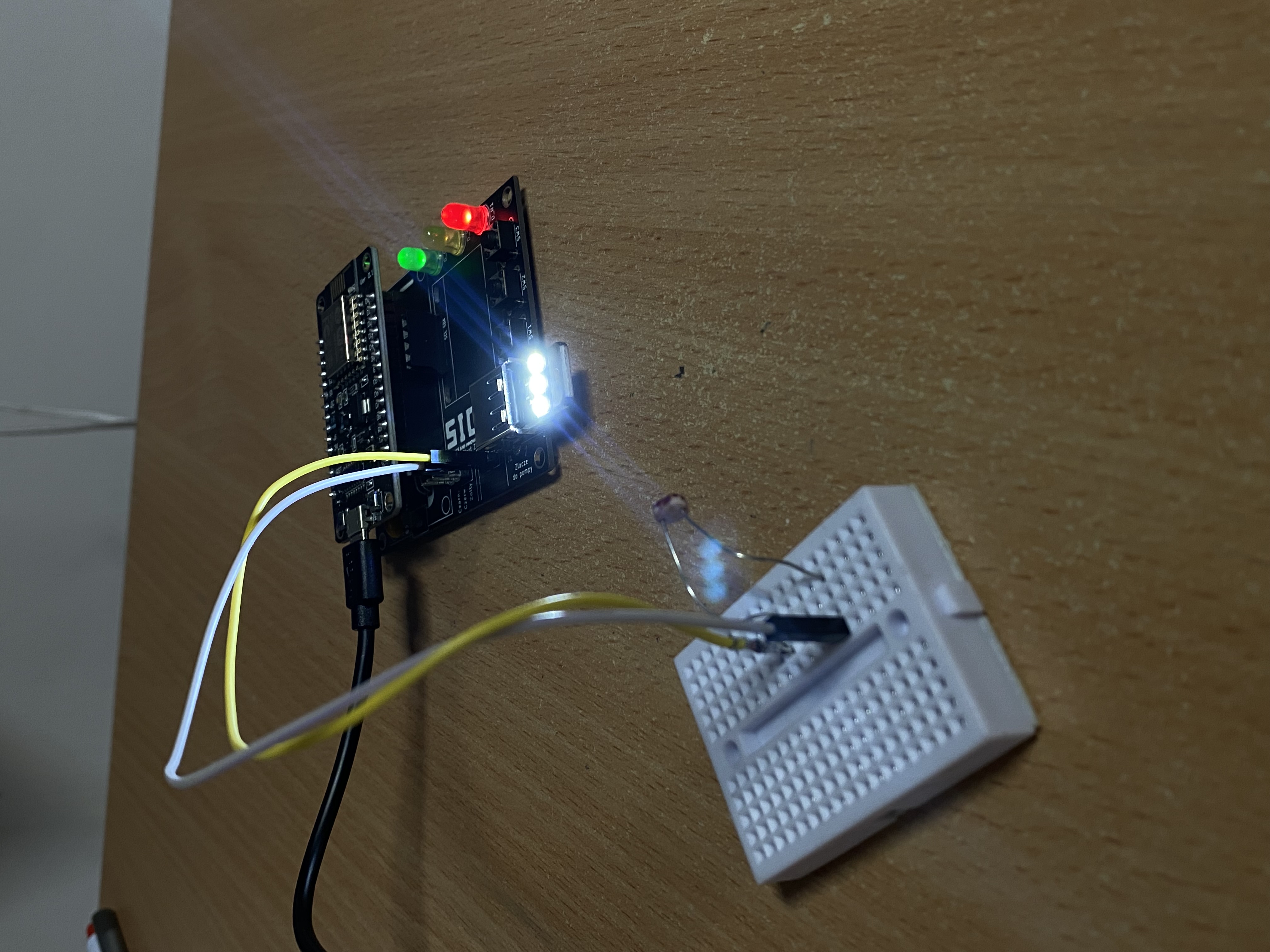
1. Płytka ESP 8266
2. lampka (dioda)
3. fotorezystor
Ogólny zarys:
Mój projekt to inteligentny system oświetleniowy oparty na mikrokontrolerze ESP8266.
System automatycznie dostosowuje jasność lampki w zależności od ilości światła
padającego na fotorezystor. Dzięki temu możliwe jest oszczędzanie energii oraz
zapewnienie optymalnego oświetlenia w zmieniających się warunkach.
Zasada działania:
Jak działa system? Fotorezystor stale monitoruje ilość światła zewnętrznego, co
pozwala systemowi ocenić bieżące warunki oświetleniowe. System wykorzystuje
regulator PID (Proportional-Integral-Derivative), aby płynnie dostosować jasność
lampki. Gdy światło zewnętrzne maleje, lampka automatycznie świeci jaśniej i
odwrotnie. Oświetlenie jest sterowane za pomocą sygnału PWM (Pulse Width
Modulation), co pozwala na precyzyjne dostosowanie jasności.
Korzyści oraz możliwe wykorzystanie projektu;
Projekt został zaprojektowany z myśla˛ o oszczędności energii oraz zwiększeniu
komfortu użytkowników. Może znaleźć zastosowanie w inteligentnych budynkach,
systemach oświetleniowych na targach czy w domach.
Niedoskonałości rozwiązania:
Pomimo wielu zalet systemu, istnieją pewne wyzwania i niedoskonałości:
• Układ można łatwo zdestabilizować, jeśli wartości parametrów regulatora PID
nie są dobrze dobrane.
• Dopasowanie współczynników kp, ki, kd wymaga precyzyjnych testów i może
być trudne w zmieniających się warunkach oświetleniowych.
• System jest wrażliwy na szumy w pomiarach z fotorezystora, co może prowadzić
do niewielkich oscylacji jasności lampki.
import machine
import time
# Klasa PID
class PID:
def __init__(self, kp, ki, kd, integral_limit=1000, dead_zone=8):
self.kp = kp
self.ki = ki
self.kd = kd
self.prev_error = 0
self.integral = 0
self.integral_limit = integral_limit # Ograniczenie dla składowej całkowej
self.dead_zone = dead_zone # Martwa strefa
def compute(self, setpoint, current_value):
# Odwrócony błąd
error = current_value - setpoint # Logika odwrócona, aby działała poprawnie
# Martwa strefa: ignorowanie małych błędów
if abs(error) < self.dead_zone:
error = 0
# Ograniczenie integralnej składowej (Anti-Windup)
self.integral += error
self.integral = max(-self.integral_limit, min(self.integral, self.integral_limit))
# Obliczenie pochodnej błędu
derivative = error - self.prev_error
# Obliczenie wyjścia PID
pwm_output = self.kp * error + self.ki * self.integral + self.kd * derivative
# Ograniczenie wyjścia do zakresu PWM
pwm_output = clamp(pwm_output, 0, 1023)
# Debugowanie PID
#print(f"DEBUG | Error: {error}, Integral: {self.integral}, Derivative: {derivative}, PWM Output: {pwm_output}")
# Zaktualizowanie poprzedniego błędu
self.prev_error = error
return pwm_output
# Funkcja ograniczająca wartości (np. dla PWM)
def clamp(value, min_value, max_value):
return max(min_value, min(max_value, value))
# Konfiguracja przycisku na GPIO2 (D4)
button_pin = machine.Pin(2, machine.Pin.IN, machine.Pin.PULL_UP)
# Stan sterowania lampką
lamp_enabled = True
# Konfiguracja lampki (PWM na GPIO14 - D5)
lamp_pin = machine.Pin(14, machine.Pin.OUT)
pwm_lamp = machine.PWM(lamp_pin)
pwm_lamp.freq(1000) # Częstotliwość PWM na 1kHz
# Konfiguracja ADC (fotorezystor na A0)
adc = machine.ADC(0) # Pin A0
# Ustawienia PID
kp = 1.03 # Wzmocnienie proporcjonalne
ki = 0.000001 # Wzmocnienie całkowe
kd = 0.5 # Wzmocnienie różniczkowe
pid = PID(kp, ki, kd, integral_limit=500, dead_zone=10)
# Stały poziom światła, który chcemy osiągnąć
setpoint = 30 # Docelowy poziom światła (w jednostkach odczytu fotorezystora)
# Funkcja obsługująca przycisk
def button_callback(pin):
global lamp_enabled
lamp_enabled = not lamp_enabled # Przełączanie stanu lampki (włącz/wyłącz)
# Rejestracja obsługi przerwania dla przycisku
button_pin.irq(trigger=machine.Pin.IRQ_FALLING, handler=button_callback)
# Pętla główna
while True:
# Odczyt wartości z fotorezystora (światło zewnętrzne)
light_value = adc.read()
# Obliczenie wartości PWM na podstawie odwróconego błędu PID
pwm_value = pid.compute(setpoint, light_value) # Odwrócenie logiki błędu
# Ustawienie jasności lampki
pwm_lamp.duty(int(pwm_value))
# Debugowanie
print(f"Light Value: {light_value}, PWM Output: {pwm_value}")
time.sleep(0.1) # Skrócone opóźnienie dla szybszej reakcji