
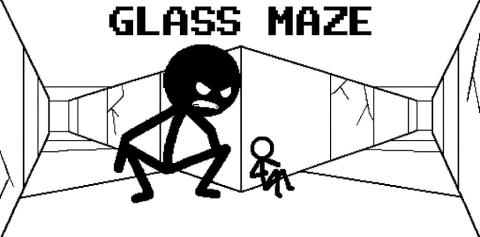
„Glass Maze” to minimalistyczny survival-horror zaprojektowany z myślą o mikrokontrolerach i małych ekranach OLED. Gracz trafia do proceduralnie generowanego, całkowicie pogrążonego w ciemności labiryntu, gdzie celem jest odnalezienie wyjścia i przejście na kolejny poziom.
Kluczową mechaniką jest latarka o ograniczonym zasięgu i baterii – oświetla jedynie wąski stożek przed postacią, zmuszając do ostrożnego i strategicznego korzystania z światła. Im mniej energii, tym słabsza widoczność, a jej całkowite wyczerpanie oznacza natychmiastową porażkę.
Każdy ukończony poziom odnawia część baterii, ale z czasem nagroda maleje, zwiększając trudność. Dodatkowe zagrożenie stanowi potwór, który pojawia się po pewnym czasie i ściga gracza, stając się coraz szybszy wraz z postępem. Choć ukrywa się w mroku, co kilka sekund zdradza swoją pozycję krótkim błyskiem.
Gra buduje napięcie poprzez ograniczoną widoczność, presję czasu i nieustanne zagrożenie, gdzie każdy błąd może zakończyć się śmiertelnym spotkaniem.
Gra MEILSTEIN 3D zaprezentowana na technikach mikroprocesorowych jest wciągającą grą strzelanką. Mierzymy się tam z przeciwnikami na zamkniętej mapie. Wykonana została na arduino UNO oraz na dołączonym do niego ekranie OLED wraz z płytką z przyciskami pozwalającymi na swobodne granie.

Klasyczna gra polegająca na obserwacji rozwoju sieci komórek podlegających działaniu algorytmu ustalającego, które żyją a które nie na początku każdej nowej generacji.

REELS OS to projekt miniaturowego, zewnętrznego monitora dedykowanego do przeglądania mediów społecznościowych w formacie pionowym. System pozwala na bezprzewodowe (poprzez port szeregowy) strumieniowanie obrazu z komputera bezpośrednio na ekran OLED, wykorzystując zaawansowane algorytmy ditheringu do uzyskania czytelnego obrazu 1-bitowego. Dzięki integracji fizycznego panelu sterowania, użytkownik może zarządzać odtwarzaniem filmów i nawigacją w przeglądarce za pomocą przycisków na urządzeniu, co tworzy unikalny, "gadżetowy" ekosystem do interakcji z ulubionymi treściami
Projekt przedstawia grę platformową retro w stylu gier na konsolę Pico-8. Gra działa na mikrokontrolerze Arduino UNO z wykorzystaniem wyświetlacza OLED 128x64 piksele oraz shielda SIC Game Console. Rozgrywka polega na przeskakiwaniu między platformami w celu wyjścia z poziomu unikając przy tym kolców. Po uruchomieniu gracz pojawia się na ekranie startowym będącym jednocześnie planszą do nauki sterowania. Rozgrywka rozpoczyna się po wyjściu z mapy startowej.

Projekt przedstawia grę platformową retro w stylu gier na konsolę Pico-8. Gra działa na mikrokontrolerze Arduino UNO z wykorzystaniem wyświetlacza OLED 128x64 piksele oraz shielda SIC Game Console. Rozgrywka polega na przeskakiwaniu między platformami w celu wyjścia z poziomu unikając przy tym kolców. Po uruchomieniu gracz pojawia się na ekranie startowym będącym jednocześnie planszą do nauki sterowania. Rozgrywka rozpoczyna się po wyjściu z mapy startowej.

Projekt implementuje grę zręcznościową „Lumberjack" na Arduino UNO z wyświetlaczem SH1106 128×64. Gracz wciela się w drwala stojącego po lewej stronie pnia drzewa i musi jak najszybciej ścinać kolejne bloki, unikając gałęzi. Każde ścięcie wydłuża odliczanie o sekundę – im szybciej gracz pracuje, tym więcej czasu zyskuje. Rozgrywkę kończy kolizja z gałęzią lub upływ licznika czasu.

Projekt to gra Pac-man z dodatkowym modułem Maszyny do Manualnej Inicjacji Procesów Probabilistycznych (MMIPP), stworzona na mikrokontrolerze Arduino UNO. System operuje na zaawansowanej pętli sterowania, która w czasie rzeczywistym analizuje sygnały z przycisków, zarządza fizyką obiektów oraz precyzyjnie weryfikuje kolizje między graczem a przeciwnikami.
Fundamentem rozgrywki jest globalny licznik monet, stanowiący wspólną walutę dla obu modułów. Aby zoptymalizować wykorzystanie pamięci RAM, dane labiryntów oraz klatki animacji bitmapowych zostały zapisane w pamięci Flash. Dzięki zastosowaniu algorytmów losowości, ruchy duchów w labiryncie są nieprzewidywalne, co znacząco podnosi poziom wyzwania, a wyniki losowań nagród są zawsze unikalne.
