
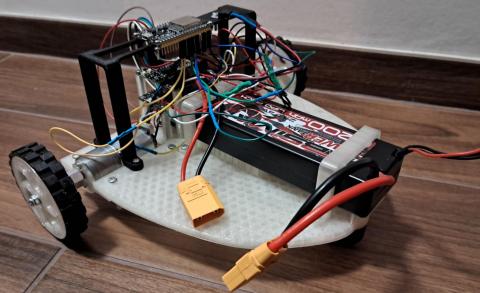
Jest to robot o dwóch kołach napędowych z oponami zapewniającymi mu wysoką przyczepność do podłoża i metalowym ball-caster'em jako trzecie koło o dwóch stopniach swobody ruchu, co zapewnia mu wysoką zwrotność. Użytkownik zdalnie steruje robotem za pomocą 4 przycisków, a on zwraca swoją informację o prędkości na podstawie odczytów z enkoderów silników, co jest to drukowane na ekranie laptopa.
Ten projekt to implementacja klasycznej gry Doodle Jump na matrycy LED NeoPixel (16x16) z wykorzystaniem mikrokontrolera ESP32 jako jednostki głównej oraz ESP8266 jako bezprzewodowego kontrolera. Komunikacja między urządzeniami odbywa się za pomocą szybkiego i energooszczędnego protokołu ESP-NOW i jest to komunikacja typu master slave. Całość została zaprogramowana w MicroPython.

Projekt prezentuje budowę instrumentu muzycznego na bazie układu ESP32 w dwóch odsłonach: od prostego pianina na klawiaturze numerycznej, po zaawansowany syntezator sterowany przez MIDI. W głównej części zrealizowaliśmy obsługę polifonii oraz zaprogramowaliśmy efekty takie jak Robot, Synthwave i Flanger, zmieniające barwę w czasie rzeczywistym. Całość uzupełnia obsługa pokręteł, które pozwalają na płynne sterowanie efektami oraz regulację głośności instrumentu.

KWONTROL to zaawansowane technologicznie rozszerzenie inteligentnej podstawki pod telefon KWOCUS, stworzone w ramach programu DUCK-tistic. O ile podstawowy KWOCUS wspierał systematyczną naukę przez motywacyjne uruchamianie cyklu Pomodoro, KWONTROL ma za zadanie aktywnie regulować i optymalizować gotowość psychiczną użytkownika do koncentracji. Moduł został wzbogacony o wyświetlacz oraz czujniki do pomiaru pulsu i natlenienia krwi, co umożliwia skuteczną redukcję stresu (poprzez ćwiczenia oddechowe) i trening uwagi (poprzez grę pamięciową) przed rozpoczęciem nauki. System ten promuje świadomą auto-kontrolę i jest realnym narzędziem w walce z rozproszeniami, zwłaszcza nadmiernym pobudzeniem.

Bezprzewodowy system wizualny oparty na matrycach LED i mikrokontrolerach ESP32, sterowany przez przeglądarkę. Moduł Centralny komunikuje się z wieloma ekranami jednocześnie za pomocą szybkiego protokołu ESP-NOW, zapewniając idealną synchronizację bez opóźnień. Ekrany same generują grafikę w czasie rzeczywistym.

Precyzyjna, dwuosiowa wycinarka CNC typu "Hot Wire" do wycinania skrzydeł i profili aerodynamicznych z pianki XPS.
Konstrukcja oparta na spawanej ramie stalowej i prowadnicach V-Slot zapewnia sztywność i pole robocze 60x60x150cm przy stosunkowo niskiej cenie komponentu (kompromis).
Sterowanie ruchem realizuje Arduino Uno z GRBL wyposażone w CNC Shield v3 z driverami DRV8825 (podwójne silniki na osiach X i Z).
Unikalną cechą jest niezależne sterowanie temperaturą drutu Kanthal (24V) za pomocą modułu ESP8266 z WiFi i wyświetlaczem OLED, umożliwiające regulację parametrów cięcia ze smartfona.

Projekt to prosta gra zręcznościowa na, uruchomiona na ESP8266 w MicroPythonie, z kontrolerem zrobionym na drugim ESP8266. Sterujemy samochodzikiem tylko w osi X, czyli na lewo lub prawo, a droga i przeszkody jadą z góry na dół. Na drodze pojawiają się nadjeżdżające samochody w postaci czerwonych pikseli. Gdy gracz w nie wjedzie gra się kończy i wyświetlany jest ekran GAME OVER oraz wynik, którym jest ilość przetrwanych w grze sekund. Dodatkowo co 10 sekund gra automatycznie zwiększa prędkość przeszkód, aby zwiększyć trudność.

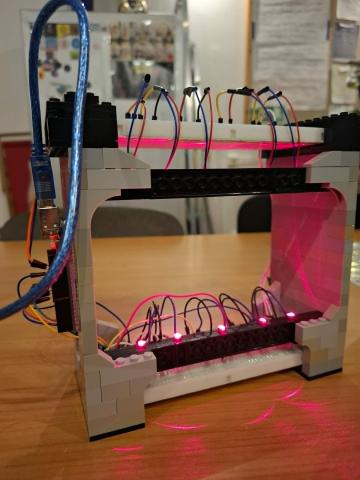
Imitacja harfy za pomocą laserów i fotorezystorów, oparta na ArduinoUno. W momencie przecięcia linii lasera, za pomocą protokołu MIDI USB przetwarzamy sygnał analogowy na cyfrowy i produkujemy dźwięk.
Jest to robotyczna platforma gąsienicowa o amortyzowanym podwoziu, wytworzona niemal w pełni poprzez technologię FDM druku 3D. W skład projektu wchodzi również pilot z dwoma joystickami. Robot ten może poruszać się w dowolnym kierunku, skręcać, a także obracać się w miejscu, o jego ruchu decyduje użytkownik, zadając komendy poprzez pilota. Platformę tę można szeroko rozwijać, np. dodając jej obrotową głowicę z czujnikiem odległości lub ramię.
Z przyjemnością przedstawiamy państwu dronowy system SOS - system oznaczania stref. Ten system może być wykorzystywany do oznaczania stref bezpiecznych w trakcie działań militarnych, klęsk żywiołowych bądź alarmowaniu o skażeniu. Stworzone przez nas beacony/ darty/ rzutki współpracują z systemem ich upuszczania, który jest zamocowany do Bezzałogowego Statku Powietrznego. Gdy dron znajdzie się na odpowiednich współrzędnych GPS darty zostają zrzucone oraz świecą się na dowolny kolor RGB - w naszym przypadku przez pierwsze 5 minut czerwony, by potem zmienić go na zielony.
